
Noker Electric, คู่ค้าของคุณเป็นมืออาชีพไฟฟ้า!


รายละเอียดสินค้า:
การชำระเงิน:
|
| การป้องกัน: | ฟังก์ชันการป้องกันที่สมบูรณ์แบบ | การควบคุมเวกเตอร์: | การควบคุมเวกเตอร์สำหรับมอเตอร์ต่างๆ |
|---|---|---|---|
| การควบคุมเวกเตอร์แบบไม่เร่งความเร็ว: | การควบคุมเวกเตอร์แบบ non-speed sensor ใหม่ล่าสุด | แรงบิดเริ่มต้น: | แรงบิดเริ่มต้นสูง |
| ประเภทมอเตอร์: | มอเตอร์ไฟฟ้าแบบอะซิงโครนัสและซิงโครนัส | สามป้องกันการฉีดพ่น: | แผงวงจรทั้งหมดมีสามแบบป้องกันการพ่น |
| แสงสูง: | ตัวควบคุมความถี่ตัวแปร,ไดรฟ์เวอร์อินเวอร์เตอร์ |
||
37 กิโลวัตต์มอเตอร์ซิงโครนัสและก้านซิงโครนัสมอเตอร์ไฟฟ้าแบบไม่เว้นคลื่นความถี่เวกเตอร์อินเวอร์เตอร์
37 กิโลวัตต์มอเตอร์ซิงโครนัสและซีพียูแบบซิงโครนัสมอเตอร์ไฟฟ้าความเร็วไม่สูงเวกเตอร์ความถี่อินเวอร์เตอร์ชุดอินเวอร์เตอร์อินเวอร์เตอร์เป็นเวกเตอร์อินเวอร์เตอร์อินเวอร์เตอร์ทั่วไปที่มีสมรรถนะสูงเหมาะสำหรับการใช้งานมอเตอร์เหนี่ยวนำรถยนต์มีให้เลือกใช้สำหรับบรรจุภัณฑ์อาหารเครื่องสูบน้ำพัดลมและ ความหลากหลายของอุปกรณ์การผลิตอัตโนมัติ
คุณสมบัติ
สนับสนุนการควบคุมเวกเตอร์สำหรับมอเตอร์ต่างๆ
1. สนับสนุนมอเตอร์แบบอะซิงโครนัสและตัวควบคุมเวกเตอร์สำหรับมอเตอร์ซิงโครนัส
2. รองรับการควบคุมเวคเตอร์สำหรับมอเตอร์ซิงโครนัสแม่เหล็กถาวรโดยไม่ต้องรับข้อมูลตำแหน่งแน่นอน
3. รองรับ encoders ต่างๆ, encoder ที่แตกต่าง, encoder collector แบบเปิดและ encoder แบบโรตารี่
การควบคุมเวกเตอร์แบบ non-speed sensor ใหม่ล่าสุด
1. การควบคุมเวกเตอรเซ็นเซอรที่ไมใชความเร็วจะทําการเคลื่อนที่ของลอล็อคและสามารถรับแรงกระแทกได 150% ที่ความเร็ว 0.5Hz
2. การควบคุมเวกเตอร์ที่ไม่ใช่ความเร็วจะลดความไวของพารามิเตอร์มอเตอร์และปรับปรุงการบังคับใช้ในปัจจุบันได้
3 สามารถใช้สำหรับการควบคุมคดเคี้ยวและการกระจายโหลดภายใต้มอเตอร์ต่างๆลากหนึ่งโหลดและโอกาสอื่น ๆ
ลักษณะของแรงบิดเริ่มต้นสูงและการตอบสนองที่เหนือกว่า
1. แรงบิดเริ่มต้น 150% สามารถให้ได้ที่ 0.5Hz (โดยไม่มีการควบคุมเวกเตอร์สำหรับเซนเซอร์) ขณะที่แรงบิด 180% ที่ความเร็วศูนย์ (พร้อมการควบคุมเวคเตอร์สำหรับเซ็นเซอร์) สามารถให้ได้ที่ 0 Hz
2. หากไม่มีการควบคุมเวกเตอร์สำหรับเซ็นเซอร์แรงบิดคือ <20 ms ด้วยการควบคุมแบบเวกเตอร์สำหรับเซ็นเซอร์แรงบิดคือ <5 ms
สเปค
| ชิ้น | ข้อมูลจำเพาะ | ||
| ฟังก์ชั่นมาตรฐาน | ช่วงแรงดันไฟฟ้าเข้า | ความผันผวนของแรงดันไฟฟ้าอย่างต่อเนื่อง: ± 10% แรงดันไฟฟ้าเปลี่ยนแปลงชั่วคราว: -15% ~ + 10% | |
| ความถี่ขาเข้า | 50Hz / 60Hz ช่วงความผันผวน: ± 5% | ||
| ความถี่สูงสุด | การควบคุมเวคเตอร์: 0 ~ 300Hz การควบคุม V / F: 0 ~ 320Hz | ||
| ความถี่ของผู้ให้บริการ | 0.5Khz ~ 16KHz ความถี่ของผู้ให้บริการจะได้รับการปรับโดยอัตโนมัติตามคุณลักษณะการโหลด | ||
| ความละเอียดความถี่ขาเข้า | การตั้งค่าดิจิตอล: 0.01Hz การตั้งค่าอะนาล็อก: ความถี่สูงสุด± 0.025% | ||
| โหมดควบคุม | การควบคุมเวกเตอร์ Sensorless fux (SVC) การควบคุมเวกเตอร์แบบวงปิด (FVC) การควบคุมแรงดัน / ความถี่ (V / F) | ||
| แรงบิดเริ่มต้น | ประเภท G: 0.5Hz / 150% (SVC); 0Hz / 180% (FVC) ประเภท P: 0.5Hz / 100% | ||
| ช่วงความเร็ว | 1: 100 (SVC) | 1: 1000 (FVC) | |
| เสถียรภาพเสถียรภาพของความเร็ว | ± 0.5% (SVC) | ± 0.02% (FVC) | |
| ความแม่นยำในการควบคุมแรงบิด | ± 5% (SVC) | ||
W ฟังก์ชั่นมาตรฐาน | กำลังรับน้ำหนักเกิน | G ประเภท: 60s สำหรับ 150% ของกระแสไฟฟ้าที่ได้รับการจัดอันดับ, 3 วินาทีสำหรับ 180% ของกระแสไฟฟ้าที่ได้รับการจัดอันดับ ประเภท P: 60s สำหรับ 120% ของปัจจุบันรับการจัดอันดับ, 3s เป็นเวลา 150% ของกระแสไฟฟ้าที่ได้รับการจัดอันดับ | |
| เพิ่มแรงบิด | เพิ่มคงที่; เพิ่มที่กำหนดเอง 0.1% ~ 30.0% | ||
| เส้นโค้ง V / F | เส้นตรง V / F โค้ง; หลายจุด V / F โค้ง; เส้น N-power V / F (1.2 กำลัง, 1.4 เฟิร์ต, 1.6 เพาเวอร์, 1.8 เพาเวอร์, สแควร์) | ||
| การแยก V / F | สองประเภท: แยกสมบูรณ์; การแยกครึ่ง | ||
| ขีด จำกัด และการควบคุมแรงบิด | สามารถ จำกัด แรงบิดโดยอัตโนมัติและป้องกันไม่ให้เกิดการสะดุดบ่อยๆในระหว่างกระบวนการทำงาน สามารถควบคุมแรงบิดได้ในโหมด FVC | ||
| เบรค DC | ความถี่เบรก DC: 0.00Hz ถึงความถี่สูงสุด เวลาเบรค: 0.0 วินาที ~ 36.0 วินาที ค่าปัจจุบันของการเบรค: 0.0% ~ 100.0% | ||
| การควบคุม JOG | ช่วงความถี่ JOG: 0.00Hz ~ 50.00Hz เวลาเร่ง / ลดความเร็วของ JOG: 0.0 วินาที ~ 6500.0 วินาที | ||
| Simple PLC, ออนบอร์ดที่ตั้งไว้ล่วงหน้าหลายความเร็ว | สามารถใช้งานได้ถึง 16 ความเร็วโดยใช้ฟังก์ชัน PLC ที่เรียบง่ายหรือการรวมกันของสถานะเทอร์มินัล X | ||
| Onboard PID | จะตระหนักถึงระบบควบคุมวงปิดแบบควบคุมด้วยกระบวนการได้อย่างง่ายดาย | ||
| การควบคุมแรงดันไฟฟ้าอัตโนมัติ (AVR) | สามารถควบคุมแรงดันไฟฟ้าเอาต์พุตได้โดยอัตโนมัติเมื่อแรงดันไฟฟ้าเปลี่ยน | ||
| การควบคุมภาวะไฟเกิน / Overcurrent | กระแสและแรงดันไฟฟ้าจะถูก จำกัด โดยอัตโนมัติในระหว่างกระบวนการทำงานเพื่อหลีกเลี่ยงการสะดุดความถี่เนื่องจาก overvoltage / overcurrent | ||
| ฟังก์ชั่นที่เป็นรายบุคคล | ประสิทธิภาพสูง | การควบคุมมอเตอร์แบบซิงโครนัสและมอเตอร์ซิงโครนัสจะดำเนินการผ่านเทคโนโลยีการควบคุมเวกเตอร์ที่มีประสิทธิภาพสูงในปัจจุบัน | |
| โหมดควบคุมแรงบิด | โหมดควบคุมความเร็วและการควบคุมด้วยแรงบิดสามารถควบคุมการตึงของห่วงเปิดได้ | ||
| นั่งเหยียบไฟฟ้าผ่าน | พลังงานข้อเสนอแนะสำหรับโหลดชดเชยการลดแรงดันไฟฟ้าเพื่อให้ไดรฟ์ AC สามารถทำงานต่อไปได้ในระยะเวลาอันสั้น | ||
| ฟังก์ชั่นที่เป็นรายบุคคล | ขีด จำกัด อย่างรวดเร็วในปัจจุบัน | ช่วยหลีกเลี่ยงข้อผิดพลาดที่เกิดจากกระแสไฟฟ้าบ่อยๆของไดรฟ์ AC |
| Virtual IO | ห้ากลุ่มของ XDO เสมือนสามารถรับรู้การควบคุมตรรกะแบบง่ายๆ | |
| การควบคุมความยาวคงที่ | ตามจำนวนของพัลส์เพื่อให้เกิดการควบคุมความยาวคงที่ | |
| การควบคุมเวลา | ช่วงเวลา: 0.0Min ~ 6500.0Min | |
| สวิทช์หลายมอเตอร์ | สามารถเปลี่ยนมอเตอร์สี่ชุดได้โดยใช้พารามิเตอร์มอเตอร์สี่กลุ่ม | |
| โปรโตคอลการสื่อสารหลาย | สนับสนุนการสื่อสารผ่าน Modbus-RTU, PROFIBUS-DP, CANlink และ CANopen | |
| การป้องกันความร้อนสูงเกินไป | การ์ดเชื่อมต่อ I / O ที่เป็นอุปกรณ์เสริมช่วยให้ AI3 สามารถรับอินพุทเซ็นเซอร์อุณหภูมิมอเตอร์เพื่อให้ได้ระบบป้องกันความร้อนสูงเกินไป | |
| ประเภทตัวเข้ารหัสหลายแบบ | สนับสนุน encoders ต่างๆเช่นตัวเข้ารหัสความแตกต่าง, encoder เปิด collector, resolver, เข้ารหัส UVW และ SIN / COS encoder | |
| วิ่ง | กำลังเรียกใช้แหล่งคำสั่ง | แผงการทำงาน; ขั้วควบคุม หม้อสื่อสารแบบอนุกรม คุณสามารถสลับระหว่างแหล่งข้อมูลเหล่านี้ได้หลายวิธี |
| แหล่งที่มาของความถี่ A | มีแหล่งสัญญาณความถี่ทั้งหมด 10 แหล่งเช่นการตั้งค่าดิจิตอลการตั้งค่าแรงดันไฟฟ้าแอนะล็อกการตั้งค่าสัญญาณอนาล็อกการตั้งค่าพัลส์และการตั้งค่าพอร์ตสื่อสารอนุกรม คุณสามารถสลับระหว่างแหล่งข้อมูลเหล่านี้ได้หลายวิธี | |
| แหล่งที่มาของความถี่ B | มีแหล่งความถี่ 10 แห่ง สามารถใช้การปรับจูนความถี่และการสังเคราะห์ความถี่ได้ | |
| ช่องใส่ | มาตรฐาน: 5 ช่องใส่ข้อมูลดิจิตอล (X) ซึ่งหนึ่งในนั้นรองรับพัลส์อินพุทความเร็วสูง 100KHz; 2 อินพุตแบบอนาล็อก (AI) ซึ่งหนึ่งในนั้นสนับสนุนอินพุตแรงดัน 0 ~ 10V 4 ~ 20mA อินพุตปัจจุบัน กำลังขยาย: 5 ขั้ว X; 1 เทอร์มินัล AI ที่รองรับแรงดันไฟฟ้า 10 ~ 10V | |
| ขั้วเอาท์พุท | มาตรฐาน: เทอร์มินัลเอาต์พุตพัลส์ 1 เฟสความเร็วสูง (open-collector) ที่สนับสนุนสัญญาณคลื่นสแควร์ 0 ถึง 100KHz; ขาออกดิจิตอล 1 ช่อง (DO); 1 ขั้วเอาต์พุตรีเลย์ ขาออกเทอร์มินัลเอาต์พุตแบบอนาล็อก 1 (AO) ที่สนับสนุนเอาต์พุตกระแส 0 ~ 20mA หรือเอาต์พุตแรงดันไฟฟ้า 0 ~ 10V กำลังขยาย: 1 ขั้ว DO; 1 ขั้วเอาต์พุตรีเลย์ 1 ขั้ว AO ที่รองรับเอาต์พุตกระแส 0 ~ 20mA หรือเอาท์พุทแรงดันไฟฟ้า 0 ~ 10V | |
| แสดงและดำเนินการบนแผงการทำงาน | จอแสดงผล LED | จะแสดงพารามิเตอร์ |
| ล็อคกุญแจและเลือกฟังก์ชั่น | สามารถล็อคกุญแจบางส่วนหรือทั้งหมดและกำหนดช่วงการทำงานของปุ่มต่างๆเพื่อป้องกันไม่ให้ฟังก์ชันผิดพลาด | |
| โหมดป้องกัน | การตรวจจับการลัดวงจรของมอเตอร์เมื่อเปิดเครื่อง, การป้องกันการสูญเสียเฟสและขาเข้า, การป้องกันกระแสไฟเกิน, การป้องกัน overvoltage, การป้องกันไฟกระโชก, การป้องกันความร้อนสูงเกินไปและการป้องกันการโอเวอร์โหลด | |
| อุปกรณ์เสริม | แผงควบคุม LCD, ชุดเบรค, การ์ดขยาย I / O 1, การ์ดต่อขยาย I / O 2, การ์ดโปรแกรมผู้ใช้, การ์ดสื่อสาร RS485, การ์ดสื่อสาร PROFIBUS-DP, การ์ดสื่อสาร CANlink, การ์ดสื่อสาร CANopen, อินพุต PG Card, UVW differential ใส่การ์ด PG, การ์ด PG ที่ใช้แก้ปัญหาและการ์ด PG ป้อนข้อมูล OC | |
| สิ่งแวดล้อม | สถานที่ติดตั้ง | ภายในอาคารปราศจากแสงแดดฝุ่นผงก๊าซที่มีฤทธิ์กัดกร่อนก๊าซติดไฟควันน้ำมันควันไอน้ำหรือเกลือ |
| ระดับความสูง | ต่ำกว่า 1000 เมตร | |
| อุณหภูมิโดยรอบ | -10 ℃ถึง + 40 ℃ (de-rated ถ้าอุณหภูมิห้องอยู่ระหว่าง 40 ℃ถึง 50 ℃) | |
| ความชื้น | ความชื้นสัมพัทธ์น้อยกว่า 95% โดยไม่มีการควบแน่น | |
| การสั่นสะเทือน | น้อยกว่า 5.9m / s 2 (0.6g) | |
| อุณหภูมิในการจัดเก็บ | -20 ℃ถึง + 60 ℃ | |
| ระดับ IP | IP20 | |
| ระดับมลพิษ | PD2 | |
| ระบบจำหน่ายไฟฟ้า | TN, TT |
ห่วงการควบคุมโหมดสายไฟ
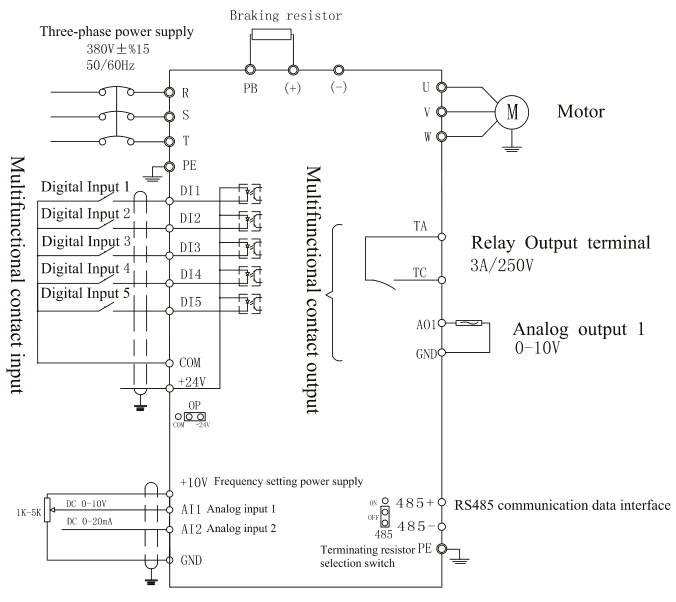
รายละเอียดฟังก์ชันของเทอร์มินอลควบคุม
ประเภท | สัญลักษณ์ของเทอร์มินัล | ชื่อเทอร์มินัล | รายละเอียดฟังก์ชัน |
|---|---|---|---|
| แหล่งจ่ายไฟ | + 10V-GND | การเชื่อมต่อภายนอกของแหล่งจ่ายไฟ + 10V | จัดหาแหล่งจ่ายไฟ + 10 V จากภายนอกโดยให้กำลังกระแสขาออกสูงสุดคือ 10mA โดยทั่วไปจะใช้เป็นแหล่งจ่ายไฟทำงานสำหรับโพเทนชิออมิเตอร์ภายนอกและช่วงความต้านทานของโพเทนชิออมิเตอร์คือ1kΩ ~ 5kΩ |
| + 24V-COM | การเชื่อมต่อภายนอกของแหล่งจ่ายไฟ + 24V | + แหล่งจ่ายไฟ 24V ให้ไว้ด้านนอกและโดยทั่วไปใช้เป็นแหล่งจ่ายไฟทำงานสำหรับขั้วอินพุต / เอาต์พุตแบบดิจิตอลและแหล่งจ่ายไฟสำหรับเซ็นเซอร์ภายนอก กำลังกระแสขาออกสูงสุด: 200mA | |
| OP | ช่องต่อเข้าของแหล่งจ่ายไฟภายนอก | ค่าเริ่มต้นจากโรงงานคือการเชื่อมต่อกับ + 24V เมื่อใช้สัญญาณภายนอกเพื่อขับ DI1 ~ DI5, OP จะเชื่อมต่อกับแหล่งจ่ายไฟภายนอกและตัดการเชื่อมต่อจากขั้วจ่ายไฟ 24 V | |
| อินพุตแบบอนาล็อก | AI1-GND | ขั้วต่ออินพุตแบบอนาล็อก 1 | 1. ช่วงแรงดันไฟฟ้าอินพุต: DC 0V ~ 10V 2. ความต้านทานขาเข้า: 22kΩ |
| AI2-GND | ขั้วสัญญาณอินพุต 2 | 1. ช่วงอินพุท: 4mA ~ 20mA, 2. ความต้านทานขาเข้า: 500Ωสำหรับอินพุทปัจจุบัน | |
| อินพุทแบบดิจิตอล | DI1-OP | ดิจิตอล อินพุต 1 | 1. การแยกขั้วต่อออปติคอลด้วยอินพุทขั้ว 2. ความต้านทานขาเข้า: 2.4kΩ 3. ช่วงแรงดันไฟฟ้าในระดับอินพุท: 9V ~ 30V |
| DI2- OP | ดิจิตอล อินพุต 2 | ||
| DI3- OP | ดิจิตอล อินพุต 3 | ||
| DI4- OP | ดิจิตอล อินพุต 4 | ||
| DI5- OP | พัลส์อินพุตความเร็วสูงเทอร์มินัล | นอกเหนือจากลักษณะของ DI1 ~ DI5 แล้วอาจใช้เป็นช่องสัญญาณพัลส์ความเร็วสูง ความถี่อินพุตสูงสุด: 50kHz | |
| เอาท์พุทอนาล็อก | AO1-GND | อนาล็อก เอาต์พุต 1 | จัมเปอร์ J5 บนแผงควบคุมต้องกำหนดแรงดันไฟฟ้าหรือกระแสเอาต์พุต ช่วงแรงดันไฟฟ้าขาออก: 0V ~ 10V ช่วงกระแสเอาต์พุต: 0mA ~ 20mA |
| เอาต์พุตรีเลย์ | T / AT / C | เปิดเทอร์มินัล | ความจุของไดรฟ์ข้อมูลติดต่อ: 25V ac, 3A, COSØ = 0.4 30Vdc, 1A |
| อินเทอร์เฟซการสื่อสาร | 485 + 485- | Modbus | อินเทอร์เฟซการสื่อสาร Modbus, เอาต์พุตไม่แยก |
โรงงาน

การบำรุงรักษาประจำวัน
เนื่องจากอิทธิพลของอุณหภูมิความชื้นและฝุ่นในสิ่งแวดล้อมและผลกระทบของการสั่นสะเทือนชิ้นส่วนภายในของเครื่องแปลงความถี่ทำให้เกิดอายุซึ่งทำให้เกิดความล้มเหลวของตัวแปลงความถี่หรือการลดอายุการใช้งานของความถี่ แปลง ดังนั้นจึงจำเป็นต้องใช้การบำรุงรักษาประจำวันและตามปกติกับตัวแปลงความถี่
รายการตรวจสอบรายวัน:
1) ไม่ว่าเสียงจะเปลี่ยนแปลงไปอย่างผิดปกติหรือไม่เมื่อมอเตอร์ทำงาน
2) การสั่นสะเทือนเกิดขึ้นเมื่อมอเตอร์กำลังทำงานอยู่หรือไม่
3) สภาพแวดล้อมการติดตั้งสำหรับตัวแปลงความถี่มีการเปลี่ยนแปลงหรือไม่
4) พัดลมระบายความร้อนของเครื่องแปลงความถี่ทำงานได้ตามปกติหรือไม่
5) ไม่ว่าตัวแปลงความถี่จะร้อนเกินไปหรือไม่
6) ทำความสะอาดรายวัน:
7) เก็บเครื่องแปลงความถี่ให้อยู่ในสถานะที่สะอาดเสมอ
8) กำจัดฝุ่นได้อย่างมีประสิทธิภาพบนพื้นผิวของตัวแปลงความถี่เพื่อป้องกันไม่ให้ฝุ่นเข้าสู่ภายในตัวแปลงความถี่ โดยเฉพาะอย่างยิ่งสำหรับฝุ่นละอองโลหะ
9) กำจัดน้ำมันได้อย่างมีประสิทธิภาพในพัดลมระบายความร้อนของเครื่องแปลงความถี่
การบำรุงรักษาประจำวัน
โปรดตรวจสอบสถานที่ซึ่งยากที่จะตรวจสอบในระหว่างการทำงาน
รายการตรวจสอบปกติ:
1) ตรวจสอบช่องอากาศและทำความสะอาดอย่างสม่ำเสมอ
ตรวจดูว่าสกรูหลวมหรือไม่
3) ตรวจสอบว่าตัวแปลงความถี่ทนทุกข์ทรมานจากการกัดกร่อนหรือไม่
ตรวจสอบว่าขั้วต่อเทอร์มินอลมีร่องรอยหรือไม่
5) การทดสอบฉนวนสำหรับห่วงหลัก
เตือน: เมื่อใช้ Megameter (ใช้เมมโมเลต DC 500V) ในการวัดค่าความต้านทานของฉนวนให้ใช้สายพันตรีที่เชื่อมต่อกับตัวแปลงความถี่ อย่าใช้เครื่องวัดความต้านทานฉนวนเพื่อวัดความเป็นฉนวนของวงควบคุม ไม่จำเป็นต้องทำการทดสอบแรงดันไฟฟ้าสูง (เสร็จเรียบร้อยแล้วในการจัดส่ง)
การจัดส่งและบรรจุภัณฑ์

ผู้ติดต่อ: Sales Manager
